







Mashine ya Kuchimba Bamba la CNC la Meza Mbili ya PD16C




| Bidhaa | Jina la kigezo | Thamani ya kigezo |
| Sahaniukubwa | Sahaniunene unaoingiliana | Upeo wa juu.80mm |
| Upana*urefu | 1000mm×1650mm Kipande 1 | |
| 825mm × 1000mm Vipande 2 | ||
| 500mm×825mm Vipande 3 | ||
| Kipenyo cha kuchimba visima | Φ12mm-Φ50mm | |
| Mbinu ya kasi inayobadilika | Mabadiliko ya kasi ya kibadilishaji bila hatua | |
| Kasi ya kuzunguka()RPM) | 120-560r/dakika | |
| Inachakata mlisho | Udhibiti wa kasi isiyo na hatua ya majimaji | |
| Sahanikubana | Unene wa kubana | 15-80mm |
| Idadi ya mitungi ya kubana | 12个 | |
| Nguvu ya kubana | 7.5KN | |
| Mota | Mota ya spindle | 5.5KW |
| Mota ya pampu ya majimaji | 2.2KW | |
| Mota ya kusafirishia ya Chip | 0.4KW | |
| Mota ya pampu ya kupoeza | 0.25KW | |
| Mota ya servo ya mhimili wa X | 1.5KW | |
| Mota ya servo ya mhimili wa Y | 1.0KW | |
| Ukubwa wa mashine | Urefu*upana*urefut | kuhusu3160*3900*2780mm |
| Wight | Mashine | takriban kilo 4000 |
| Mfumo wa kuondoa chipsi | takriban kilo 400 | |
| Kiharusi | Mhimili wa X | 1650mm |
| Mhimili Y | 1000mm |
1. Mashine hii inaundwa zaidi na kitanda, gantry, meza ya ubadilishaji (meza mbili), kichwa cha nguvu cha kuchimba visima, mfumo wa majimaji, mfumo wa udhibiti, mfumo wa kulainisha wa kati, mfumo wa kuondoa chipsi, mfumo wa kupoeza, chuki ya kubadilisha haraka, n.k.
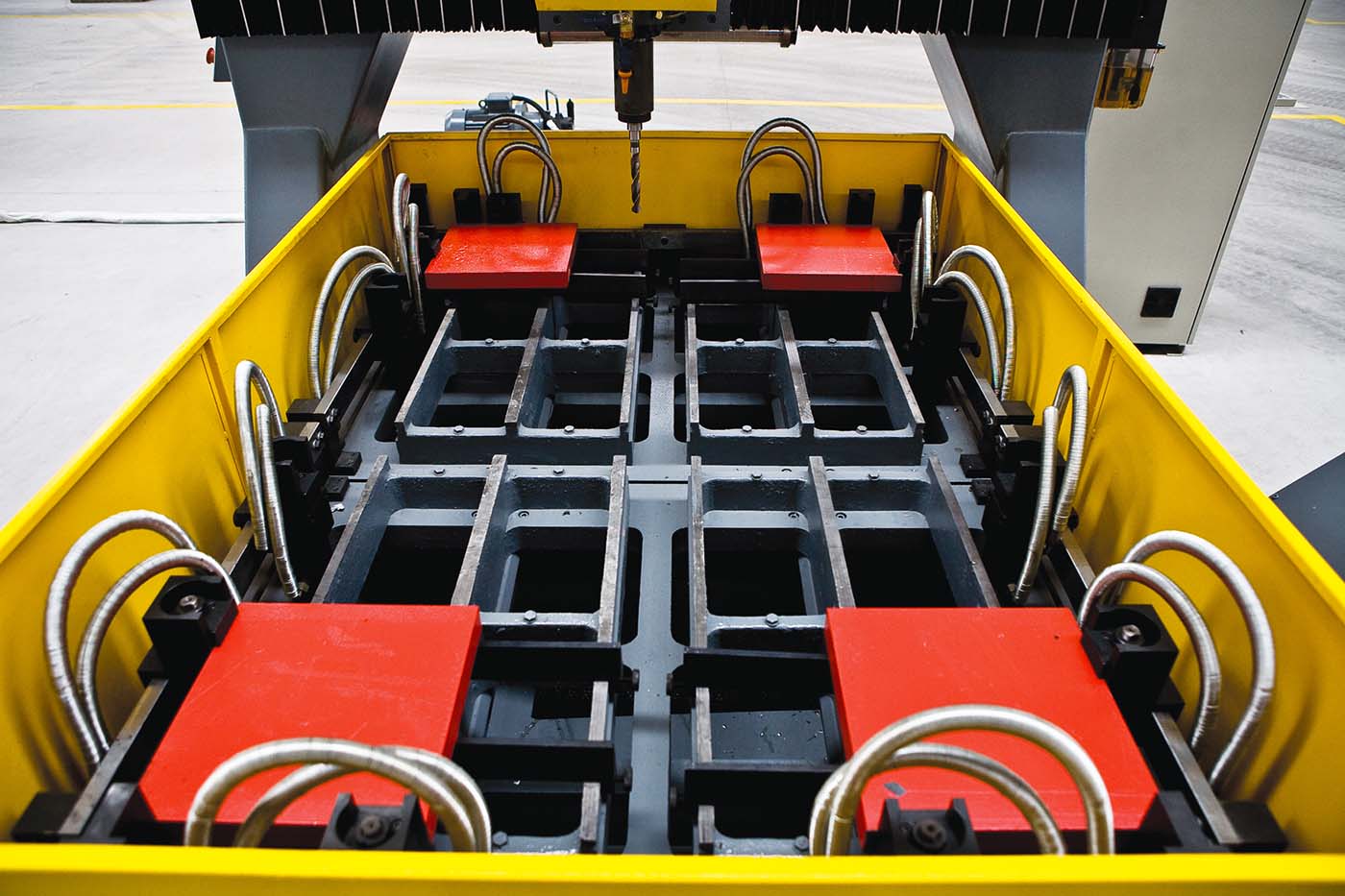
2. Mashine hii inachukua umbo la kitanda kisichobadilika na gantry inayoweza kusongeshwa. Gantry, kitanda na meza ya kazi zote ni miundo iliyounganishwa, na baada ya matibabu ya kuzeeka, usahihi ni thabiti. Bamba hubanwa na clamp za majimaji, na mwendeshaji hudhibitiwa na swichi ya mguu, ambayo ni rahisi na inayookoa nguvu kazi;


3. Mashine hii ina shoka 2 za CNC: mwendo wa gantry (mhimili wa x); mwendo wa kichwa cha nguvu ya kuchimba kwenye boriti ya gantry (mhimili wa y). Kila mhimili wa CNC unaongozwa na mwongozo wa usahihi wa mstari wa kuzungusha, ambao unaendeshwa moja kwa moja na mota ya AC servo + skrubu ya mpira. Mwendo unaonyumbulika na uwekaji sahihi.
4. Kichwa cha nguvu cha kuchimba visima cha kiharusi cha kudhibiti kiotomatiki cha majimaji ni teknolojia ya kampuni yetu iliyo na hati miliki. Hakuna haja ya kuweka vigezo vyovyote kabla ya matumizi, na ubadilishaji kati ya kusonga mbele kwa kasi, kusonga mbele kwa kazi na kurudi nyuma kwa kasi hugunduliwa kiotomatiki kupitia kitendo cha pamoja cha umeme-majimaji.
5. Kifaa hiki cha mashine hutumia mfumo wa kulainisha wa kati badala ya uendeshaji wa mikono ili kuhakikisha kwamba sehemu zinazofanya kazi zimepakwa mafuta vizuri, kuboresha utendaji wa kifaa cha mashine, na kuongeza muda wa matumizi yake.
6. Programu ya udhibiti hutumia programu ya juu ya programu ya kompyuta inayolingana na kidhibiti kinachoweza kupangwa kilichotengenezwa kwa kujitegemea na kampuni yetu.



Wasifu Fupi wa Kampuni  Taarifa za Kiwanda
Taarifa za Kiwanda  Uwezo wa Uzalishaji wa Mwaka
Uwezo wa Uzalishaji wa Mwaka  Uwezo wa Biashara
Uwezo wa Biashara 
Aina za bidhaa
-

Mashine ya Kuchimba Visima ya CNC ya PLD2016 kwa Sahani za Chuma
-

PLD3030A&PLD4030 Gantry Mobile CNC Drillin...
-

Mashine ya Kuchimba Visima ya PD30B CNC kwa Sahani
-

Hati ya Kiufundi ya PDDL2016 Aina ya Akili...
-

Mashine ya Kuchimba Bamba la CNC la Gantry la Mkononi la PLD7030-2
-

Mashine ya Kuchimba Visima ya CNC ya PHD2020C kwa Sahani za Chuma